
裏給我發消息")

1)前言
之前我們已經對(duì)旋轉磁場有了(le)一些(xiē)了(le)解了(le),這(zhè)一章開(kāi)始我們來(lái)介紹一些(xiē)異步電機的知(zhī)識異步電機有兩種常見的形式,一種是轉子直接使用(yòng)導體棒構成類似于鼠籠的鼠籠式異步電機,另一種是使用(yòng)了(le)與定子三相繞組同款的對(duì)稱繞組的繞線轉子電機
2)繞線轉子電機的機械結構
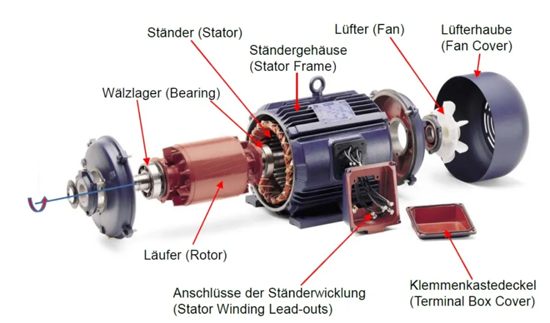
異步電機最明(míng)顯的特征是:轉子轉數不必與磁場轉數相等,即所謂的“異步”。異步電機是如今使用(yòng)的最爲廣泛的電動機,比如說最常使用(yòng)的鼠籠式轉子是一種抗擾動、少維護、可過載、制造方便的簡單設計(jì),不過由于鼠籠式異步電機的感應電流是在整個轉子導體上(shàng)的渦流,分析起來(lái)比較複雜(zá),所以我們先從(cóng)繞線轉子電機開(kāi)始介紹
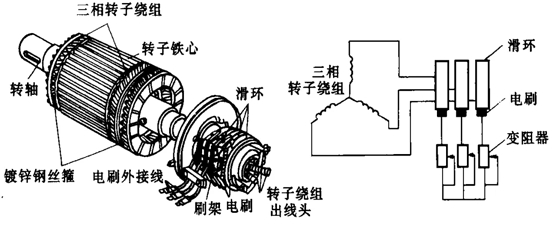
繞線轉子電機的轉子是帶槽的疊片鐵(tiě)芯構成,并且上(shàng)面有和(hé)定子繞組類似的三相繞組,其中,槽中的繞組也(yě)像定子繞組一樣有相區(qū),經過繞線後,在輸出軸另一端接出三捆繞組,接在同軸的滑環,電刷接觸在滑環上(shàng)就形成了(le)星形電路,可以接上(shàng)電阻或變阻或直接接入三相電流
3)基本原理(lǐ)
根據前面介紹的原理(lǐ),定子繞組裏通入三相交流電,會(huì)産生旋轉磁場,假設我們通入的交流電頻率爲fs,産生的旋轉磁場的電角速度爲ws,機械角速度爲Ωs,n0爲同步轉數,于是就有

在繞線轉子電機的轉子中就會(huì)産生感應電壓,其幅值大(dà)小(xiǎo)與轉差率s以及定子電角速度ws成正比,當轉子以同步轉速n0一樣的速度運動時(shí),那麽轉子就與定子的旋轉磁場相對(duì)靜止,那麽通過轉子的總磁鏈就恒定了(le),按照法拉第電磁感應定理(lǐ),轉差率爲0時(shí),就不會(huì)産生感應電壓

轉子上(shàng)的轉差頻率爲


有了(le)轉差頻率的轉子,才會(huì)感應出電壓,從(cóng)而在轉子繞組上(shàng)産生感應電流,有了(le)旋轉磁動勢,這(zhè)個旋轉磁動勢在空(kōng)間上(shàng)也(yě)是以一個轉差角速度ΩR運動


所以在一個異步電機裏一共有3個速度,定子的旋轉磁場轉速ΩS,轉子的機械轉速Ωm和(hé)轉差角速度ΩR。異步電機要産生恒定轉矩,轉子轉數也(yě)需要滿足頻率條件,而且不能(néng)爲同步轉數,這(zhè)也(yě)是異步電機名字的由來(lái)
根據楞次定理(lǐ),激發出來(lái)的感應電流勢必阻礙它的産生,所産生的轉矩會(huì)驅動或者阻礙轉子,當有異步轉數n=(1-s)n0
所以,實際工(gōng)作(zuò)時(shí),異步轉數總達不到(dào)同步轉數,有一定的轉差率,否則就沒有感應作(zuò)用(yòng),也(yě)沒有轉矩産生,轉矩的大(dà)小(xiǎo)和(hé)定子磁場以及轉子磁動勢幅值及相位差有關

一些(xiē)變量都可以通過轉子電路附加的變電阻來(lái)影響以及控制,不過這(zhè)種傳統的會(huì)增加額外(wài)損耗的電機控制方法現(xiàn)在一般都會(huì)通過變頻的方式來(lái)替代
4)電壓方程
現(xiàn)在我們可以考察繞線轉子電機在穩态工(gōng)作(zuò)時(shí)的電壓方程了(le)
通入到(dào)定子電流有

對(duì)應的轉子電流爲

定子的磁動勢爲

對(duì)應的轉子磁動勢爲

最終合成的磁動勢爲

從(cóng)定子産生的旋轉磁場爲


對(duì)應轉子上(shàng)的旋轉磁場爲


最終合成的旋轉磁場爲

5)等效電路
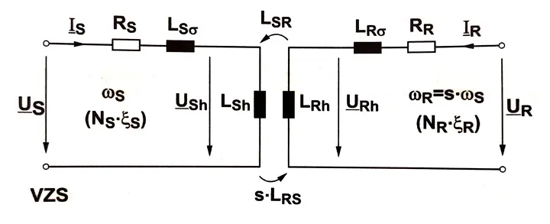
根據電壓方程,我們可以畫(huà)出繞線轉子電機的等效替代電路圖,值得注意的是,定子會(huì)在轉子中激發頻率爲fR的交變磁場,反過來(lái),轉子也(yě)會(huì)在定子中激發頻率爲fS的交變磁場
由于定子和(hé)轉子之間是電氣隔離的,兩個電路是不能(néng)直接合并到(dào)一起的,爲了(le)能(néng)夠順利的把兩個電路合二爲一,我們需要将轉子側的變量都換算(suàn)到(dào)定子側去,我們可以使用(yòng)變壓器的等效模型,取一個變換因數,就有


選擇不同的變換因數,就能(néng)夠産生不同的等效電路,比如說我們選擇
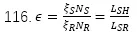
根據
就可以簡化得到(dào)

今天的公式轟炸就到(dào)這(zhè)兒了(le),大(dà)家愉快(kuài)享用(yòng)~